We like to share some of the processes for pre-flight planning in taking high resolution aerial photo using UAV.
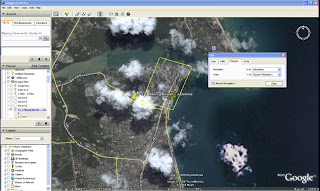
The early stage planning is by identifying area that is required to be covered. We use Google Earth Pro to plan the area as well as to get idea on the estimate coverage. Google earth satellite images inherited 20-50 meter accuracy but still it is easiest and fastest way to get an idea how the site look like, other alternative is to visit the coverage area for ground control points (etc), which in many cases, we do not have the resources to do so.
Once we agreed with the coverage area in Google Earth, we will save the raster high res GE image, this features can only be done using GE pro. The jpeg file is save in
Lentsika map folder for future viewing.
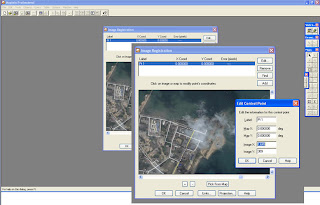
Meanwhile, the jpeg image need to be registered from Raster to geo spatial vector format and the image registration process is done using Map Info software to produce
*.tab format. We need min 3 control points to produce vector table image but in our situation, we normally take 5 control points, which we grap from Google Earth satellite points and this is actually not enough, (and yes, this mean we already inherited like 20-50 meter inaccuracy). Good control points is by going to the ground and ta
ke 15-30 GCP, again, in our case, we do not have pleasure and resource to do so. Once the coverage sat image is registered in WGS84 projection. The image can be viewed in our
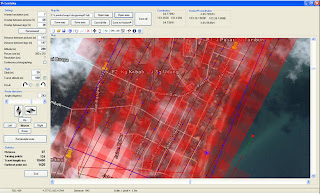
Lentsika flight planning software. Lentsika is developed by Mr. Altos who is working in Finland Forestry R&D centre and is also using Cropcam UAV for their forest monitoring etc. Lentsika is so far the powerful software in managing Cropcam Micropilot UAV flight plan, which give us the coverage area, flight paths, altitudes, attitudes, required resolution, number of images etc. Once we satisfied with the Lentsika flight plan, the flight logs is saved to *.fly file to
Horizon ground control software. Can open Horizon software fly and tab files for fligh
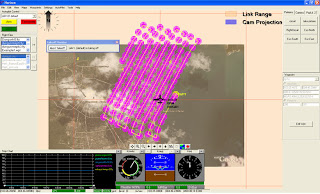
t simulation as well as final adjustment in altitute control, flight pattern etc. Geo Sense normally set UAV flight altitute to 320 m or 1,200 ft, which give us approx 6 cm res per pixel image. Horizon log files (fly file) is than transmitted to UAV autonomious flight system or Micropilot for flight data and than trasmitted back to Horizon ground control wirelessly for flight data syn.
There are many ways to fail the flight plan or even to lost the UAV, most controllable and some beyond our control. So far we find we are always subjected to
Murphy Law.

Next..how we process large aerial images.

 Geo Sense had been taking and stitching thousands acres of high res aerial images in and around Iskandar Malaysia Development Region. One of the problems that we are facing is when stitching small area with high object like minaret or dome. This is due UAV flies low and many shots were taken with various orientation to fit small area such as pic of UTM Mosque on the upper left.
Geo Sense had been taking and stitching thousands acres of high res aerial images in and around Iskandar Malaysia Development Region. One of the problems that we are facing is when stitching small area with high object like minaret or dome. This is due UAV flies low and many shots were taken with various orientation to fit small area such as pic of UTM Mosque on the upper left.